Project Description
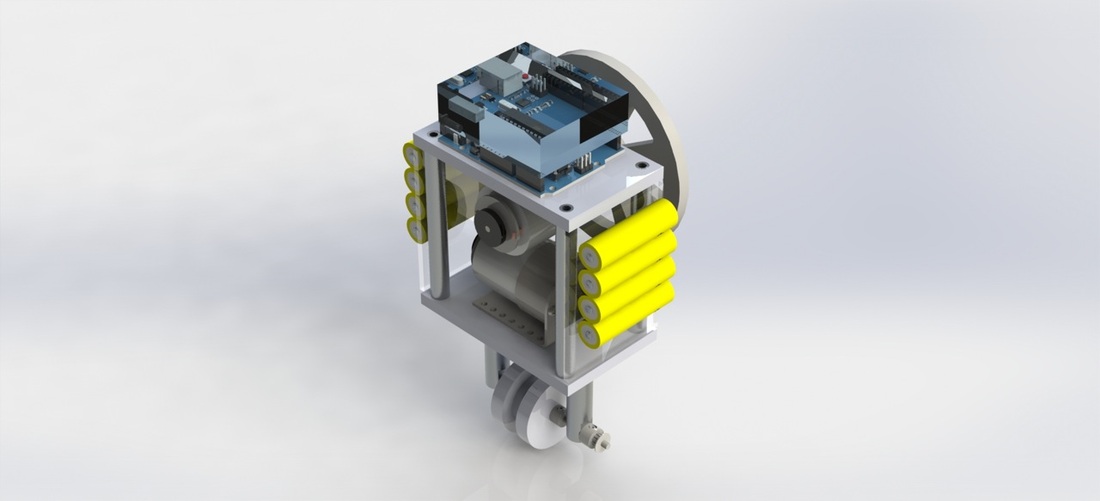
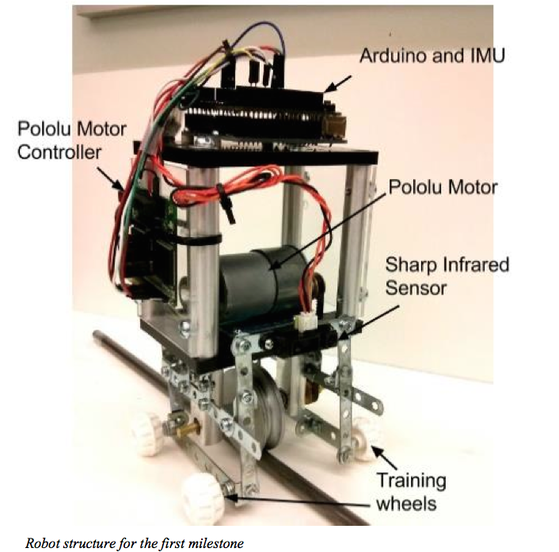
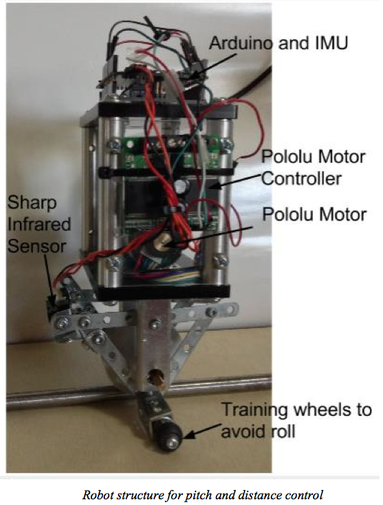
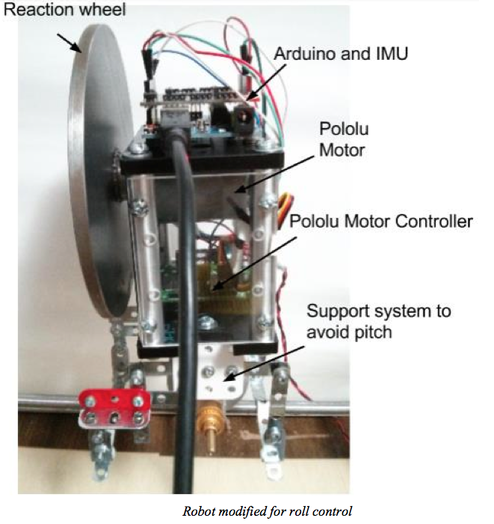
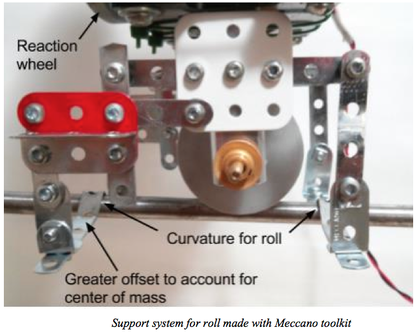
Project: Designed, built, programmed, & tested an Arduino-based autonomous robot (1 point of contact), capable of moving while balancing and stabilizing (given disturbances); achieved ‘Segway’ balance (nested PID including IR sensor-based proximity control) and preliminary roll (using reaction wheel). Used system modeling; data analysis in MATLAB.
Course: MECH 400 Design Project
Group of 4 members
Course: MECH 400 Design Project
Group of 4 members
Youtube Links:
Proximity Test using IR Sensor (Milestone 1)
Proximity Test using IR Sensor (Milestone 1)
Final Milestone (Segway Control - Pitch Balance and Range Sensing)
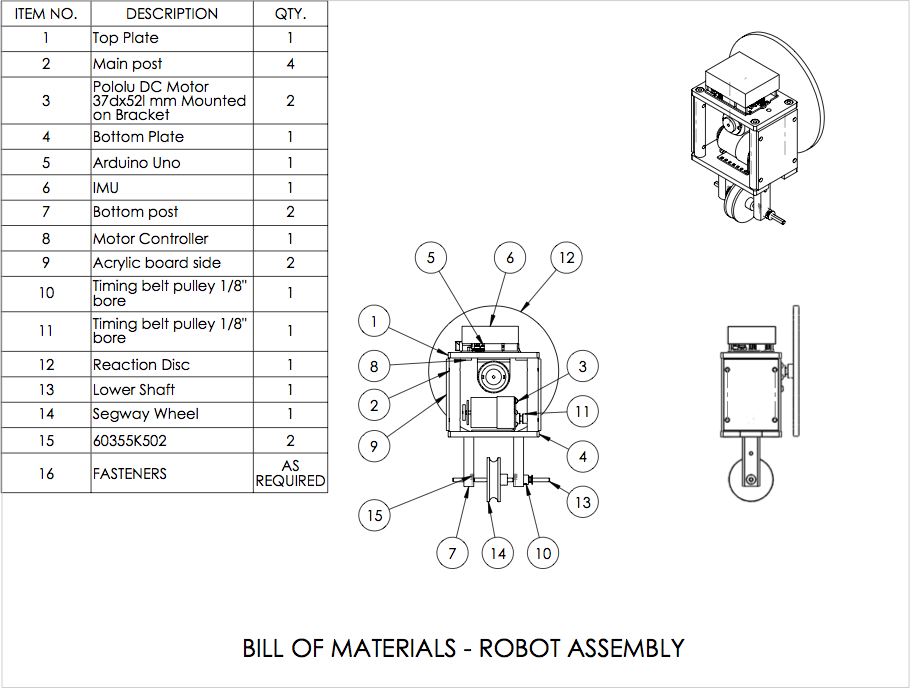
Some pictures/engineering drawings of the robot are shown below.